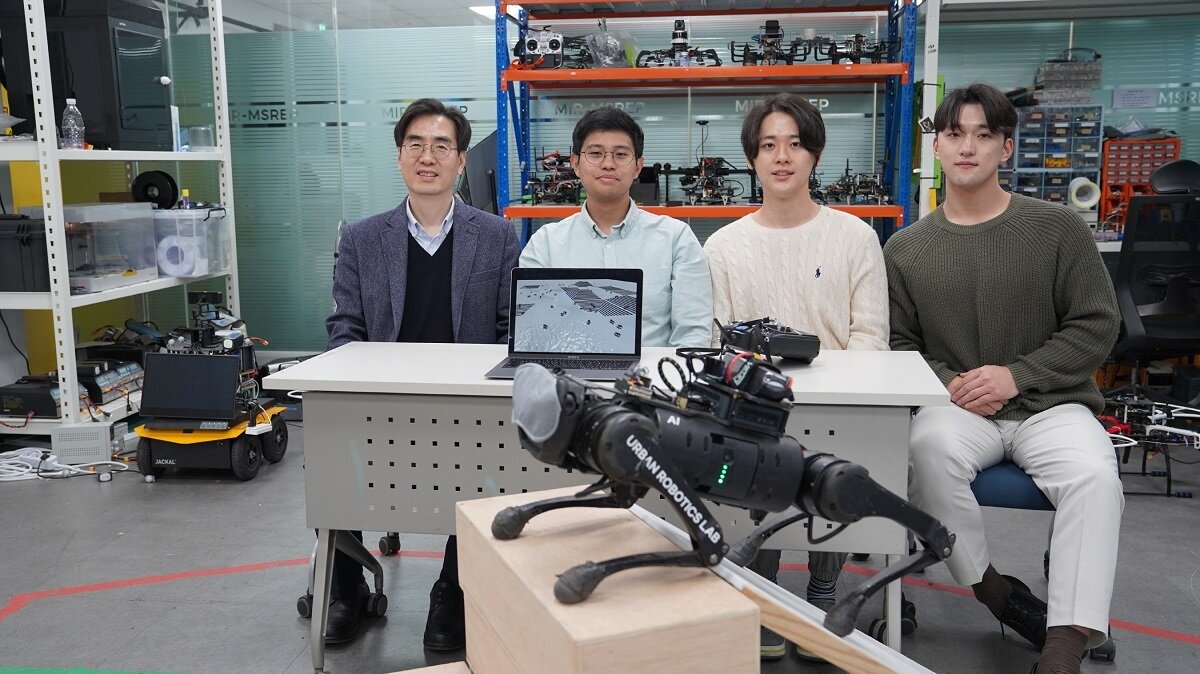
카이스트 명현 교수 연구팀, 보행 로봇 '드림워커' 개발인공지능 학습으로 험한 지형에도 적응(왼쪽부터) 카이스트 전기및전자공학부 명현 교수, 이 마데 아스윈 나렌드라(I Made Aswin Nahrendra) 박사과정, 유병호 박사과정, 오민호 박사과정 (카이스트 제공) 2023.03.29 /뉴스1관련 키워드로봇자율주행카이스트김승준 기자 [인사]산업통상부"농식품부에 '김민혁 주무관' 없다"…李대통령도 리트윗한 피싱 경고관련 기사행동하는 AI 시대…피지컬 AI가 산업 생태계 바꾼다AI 학습 정체·지식 망각 해결 기술 나왔다李대통령, 규제합리화위원회 첫 회의…'6대 구조개혁' 신호탄(종합)KAIST 학부생 로버팀, 세계 화성탐사 대회 'URC 2026' 본선 진출와이파이 기반 국가 라디오맵 기반 기술 개발…위치 주권 확보 신호탄