KAIST 학부생 로버팀, 세계 화성탐사 대회 'URC 2026' 본선 진출
- 김종서 기자
(대전=뉴스1) 김종서 기자 = 한국과학기술원(KAIST) 학부생들이 직접 만든 탐사 로버로 세계 최대 화성탐사 대회 본선에 나선다.
한국과학가술원(KAIST)은 학부 로봇 동아리 '마이크로봇 리서치(MR)' 소속 로버팀 'MR2'가 세계 최대 대학생 화성탐사 로버 경진대회 '2026 유니버시티 로버 챌린지(URC)' 본선 진출권을 획득했다고 3일 밝혔다.
URC는 미국 화성 탐사 연구소가 주관하는 국제 대회로, 유타주 사막의 화성과 유사한 환경(MDRS)에서 열린다. 참가팀들은 직접 제작한 탐사 로버를 활용해 △생명 탐사 △물품 운송 △장비 조작 △자율 주행 등 4개 미션을 수행하며 기술력을 겨룬다.
이번 대회에는 전 세계 18개국 116개 대학팀이 참가해 치열한 예선을 치렀다. KAIST MR2 팀은 100점 만점에 95.38점을 기록하며 상위 38개 팀에 선정돼 본선 진출을 확정했다. KAIST 팀 최초의 본선 진출 성과다.
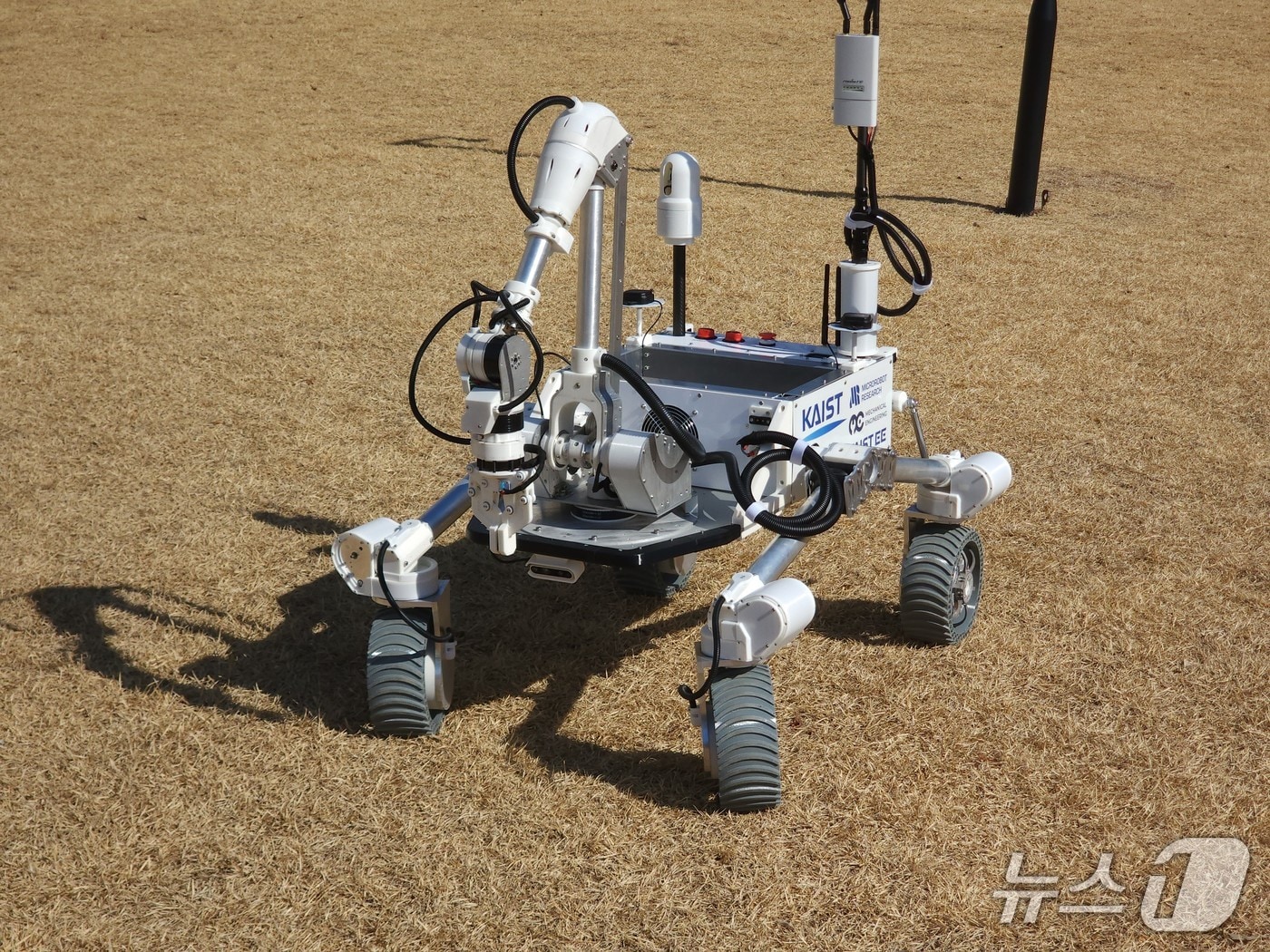
KAIST팀이 독자 개발한 차세대 탐사 로버 'GAP-1000'은 극한 환경에서도 안정적인 운용이 가능하도록 설계된 모듈형 로버다. 5㎏ 이상의 물체를 정밀하게 제어할 수 있는 6자유도(6-DOF) 로봇 팔을 탑재해 복잡한 장비 조작 임무를 수행할 수 있다.
자율 주행 기능도 강점이다. 위성을 활용한 정밀 위치 측정 기술(RTK-GNSS)과 로봇의 움직임을 감지하는 관성 센서(IMU), 바퀴 회전을 기반으로 이동 거리를 계산하는 기술을 결합해 복잡한 지형에서도 스스로 최적의 경로를 찾아 이동한다. 여기에 드론 중계 시스템을 더해 통신이 닿지 않는 구간에서도 안정적인 탐사가 가능하다.
또 화성 과학 탐사 임무를 위해 지면 10㎝ 아래 토양을 채취한 뒤 원심분리로 불순물을 제거하고, 단백질 검출 시약인 뷰렛과 브래드퍼드를 활용해 생명체 흔적을 분석한다. 빛의 파장을 분석해 물질의 성분을 파악하는 분광 분석 기술을 결합해 생명체의 흔적을 실시간으로 탐지할 수 있는 통합 시스템을 구축했다.
MR2 총괄팀장 기계공학과 정명우 학생은 "설계부터 제작까지 모든 과정을 직접 수행하며 많은 시행착오를 겪었지만 KAIST 최초 본선 진출이라는 성과를 거둬 기쁘다"며"남은 기간 철저히 준비해 현지에서 좋은 결과를 내겠다"고 말했다.
박용화 지도교수는 "학생들이 독자적으로 극한 환경용 로버를 구현해낸 점이 인상적"이라며 "이번 대회가 KAIST의 기술력을 세계에 알리는 계기가 될 것"이라고 밝혔다.
MR2은 기계공학과, 전기및전자공학부, 산업디자인학과 등 다양한 전공의 학부생 13명으로 구성돼 있다. 현재 실제 야외 환경에서 장거리 운용 테스트를 마치고 본선을 위한 최종 점검을 진행 중이다. 본선 대회는 오는 5월 27일부터 30일까지 미국 유타주 MDRS에서 열린다.
jongseo12@news1.kr
Copyright ⓒ 뉴스1. All rights reserved. 무단 전재 및 재배포, AI학습 이용금지.