팀플 깨져도 역할 재분배 '척척'…UNIST, AI 학습 기술 개발
- 김세은 기자
(울산=뉴스1) 김세은 기자 = 자율 드론의 군집 비행이나 공장에서 손을 맞춰 일하는 AI 로봇들 간엔 '팀플'이 중요한데, '팀플'이 깨진 상황에서도 목표 임무를 이어갈 수 있게 하는 학습 기술이 개발됐다.
울산과학기술원(UNIST) 인공지능대학원 한승열 교수팀은 AI 에이전트 간의 협력 고리를 일부러 끊으며 훈련하는 기술인 '상호작용 차단 적대 학습(IBAL, Interaction-Breaking Adversarial Learning)'을 개발했다고 24일 밝혔다.
이번에 개발된 IBAL은 일부 AI가 멈추거나 서로의 위치와 상태를 제대로 파악하지 못해도, 남은 AI들이 새로운 협력 방식을 찾아 임무를 이어가게 하는 학습법이다.
이러한 대응 능력을 키우기 위해 학습 과정에서 협력 네트워크가 깨지는 상황을 반복적으로 만들게 된다.
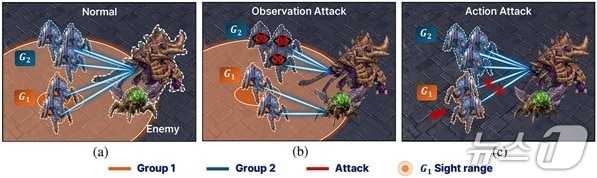
AI를 두 그룹으로 나누고, 그룹 간 협력에 어떤 정보와 행동이 중요한지를 분석한 뒤, 중요한 정보를 가리고 협력을 깨뜨리는 행동을 유도한다.
또 학습 단계마다 그룹 구성을 무작위로 바꾸고 공격 강도를 학습 상황에 맞춰 자동으로 조절해 다양한 형태의 협력 붕괴 상황을 폭넓게 경험하도록 설계됐다.
연구팀은 유명 전략 게임 '스타크래프트 II' 기반의 실험 환경(SMAC)에서 아군 유닛 일부가 갑자기 작동을 멈추는 돌발 상황을 가정해 성능을 검증했다.
실험 결과, 기존 AI 모델들은 팀원 결손 시 전체 협력 체계가 도미노처럼 무너지며 일부 모델은 승률이 13.3%까지 급락했다.
반면 IBAL로 학습한 경우엔 체력이 떨어진 유닛을 후방으로 빼고 건강한 유닛을 전면에 내세우는 등 진형을 재구축해 87.0%의 압도적인 승률을 기록했다.
해당 기술은 자율 드론과 군집 로봇, 스마트 팩토리처럼 다수의 AI가 함께 작동하는 시스템에 활용될 전망이다.
한승열 교수는 "이번 기술은 이런 돌발 상황에서도 남은 AI들이 스스로 역할을 다시 나누고 임무를 이어가도록 훈련할 수 있어, 앞으로 다수의 AI가 함께 작동하는 시스템의 안전성과 신뢰성을 높이는 기반 기술이 될 것"이라고 기대했다.
연구 결과는 세계 3대 인공지능 학회 중 하나인 국제머신러닝학회(International Conference on Machine Learning, ICML) 2026에 채택됐다. 2026 ICML은 내달 6일부터 11일까지 서울 코엑스에서 열린다.
syk000120@news1.kr
Copyright ⓒ 뉴스1. All rights reserved. 무단 전재 및 재배포, AI학습 이용금지.